
Les robots humanoïdes progressent à grands pas. Leur ambition ? Accompagner, voire, dans certains cas, remplacer l’humain dans des tâches variées. Mais malgré les avancées impressionnantes dans la robotique, reproduire un corps humain reste un casse-tête, notamment lorsqu’il s’agit de concevoir… une main.
Le Tesla Optimus est l’un des robots humanoïdes les plus en vogue. Depuis sa première présentation en 2021, le robot de l’entreprise dirigée par Elon Musk a bien changé, continuant de s’améliorer jusqu’à l’autonomie parfaite. Certes l’autonomie totale n’est pas encore à l’ordre du jour, mais des paliers importants ont déjà été franchis, notamment au niveau très exigeant de la main. Le dernier progrès remonte au mois de novembre 2024 où à l’occasion du Black Friday, Tesla a présenté via son compte X la nouvelle main de son robot Optimus plus humaine. (Voir le tweet ci-dessous)
Avec l’émergence de projets comme Tesla Optimus, Figure 01 ou Ameca, la robotique humanoïde entre dans une phase concrète. Le but affiché, reproduire les gestes humains avec un maximum de réalisme, d’agilité et de polyvalence. Pourtant, comme le rappellent ingénieurs et investisseurs du secteur, recréer un humain dans ses moindres détails est loin d’être gagné. Et pour cause, la main humaine représente l’un des défis technologiques les plus ardus de toute l’ingénierie robotique.
L’explication d’Elon Musk au sujet de la problématique des mains des robots humanoïdes
Dans une interview donnée pour X Takeover le 27 juillet dernier (voir la vidéo ci-dessous à partir de 51min30), Elon Musk a expliqué :
« Les mains concentrent plus de 50 % du problème électromécanique d’un humanoïde ».
Une formule choc qui, si elle est exagérée dans l’absolu, traduit une réalité, les mains sont un mur technologique à elles seules. Même les leaders mondiaux en robotique peinent à franchir ce seuil de complexité.
Au delà de la simple formule, Elon Musk développe dans le détail les difficultés liées au mains en évoquant l’exemple du robot Tesla Optimus :
« Il y a qu’un petit nombre de muscles dans votre main, elle est entièrement controlée par des tendons qui passent soit à travers, soit au dessus de votre canal carpien. Optimus est une intelligence alimentée par l’AI4 le même ordinateur que la voiture (Tesla ndlr). Donc il y a beaucoup de similitudes avec la voiture. Et puis l’IA qui est dans la voiture est similaire à l’IA qui sera dans Optimus, exécutant le matériel AI4 puis le matériel AI5 lorsqu’il sera prêt. Le facteur limitant est la main. Mais je suis convaincu qu’Optimus sera le plus gros produit jamais crée ».
Un cauchemar à 27 articulations
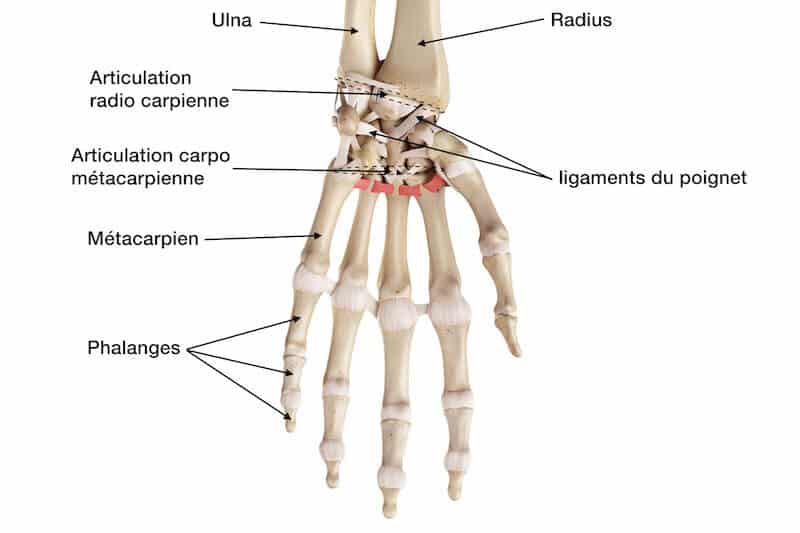
La main humaine, c’est un condensé d’ingénierie naturelle :
- 23 à 27 degrés de liberté (DoF) selon la méthode de comptage. Un degré de liberté correspond à un mouvement indépendant possible autour d’un axe.
- 19 articulations distinctes, à savoir 14 articulations interphalangiennes et 5 articulations métacarpo-phalangiennes.
- 18 tendons traversant le poignet,
- plus de 30 muscles, dont plusieurs logés directement dans la paume.
Chaque doigt effectue des mouvements de précision extrême, attraper une feuille sans la froisser, maintenir une pièce métallique sans glisser. Cela exige une coordination instantanée entre les capteurs tactiles, les ajustements de force, et la prédiction du comportement de l’objet manipulé.
Pour un robot, cela signifie miniaturiser les actionneurs, intégrer des capteurs haute précision, et développer des algorithmes capables de gérer des centaines de variables en temps réel.
Muscles invisibles, mais essentiels
On entend souvent que tout se passe dans l’avant-bras pour la main et c’est en partie vrai, puisque c’est à cet endroit, que les muscles extrinsèques (flexion/extension) se trouvent. Mais les muscles intrinsèques (thénars, interosseux, lombricaux) situés dans la main jouent un rôle clé pour l’écartement indépendant des doigts, le contrôle fin du pouce, et la précision de la préhension.
Dans son interview Elon Musk explique comment fonctionne les muscles composant une main :
« Regardez vos mains, si vous sentez votre avant bras presque tous les muscles qui contrôlent votre main sont en fait dans votre avant bras et ils tirent vos doigts comme des marionnettes ».
En robotique, cette dualité pose un dilemme. Faut-il placer les moteurs dans l’avant-bras, ce qui libère de l’espace mais complexifie la transmission, (longueur des câbles, frottement, perte de précision) ou intégrer les moteurs dans la main d’augmenter le poids, l’encombrement et l’échauffement. Chaque configuration implique des compromis entre précision, compacité, performance et maintenance.
Les pièges cachés des tendons robotiques
La plupart des mains robotiques avancées utilisent des systèmes à câbles ou tendons, pour imiter la biomécanique humaine. Mais cette solution pose de nombreux problèmes :
- Frottements internes,
- Jeux mécaniques,
- Hystérésis (retard entre commande et réponse),
- Usure rapide.
Au final, la force n’est pas transmise de manière linéaire, et la main devient imprévisible. Pour compenser, les ingénieurs ajoutent des capteurs de position, pression, température, modélisent la friction, intègrent des algorithmes de compensation adaptatifs. Mais cela alourdit l’ensemble, plus de complexité, de coût, de fragilité.
Simulation vs réalité : le test du terrain
Quelques projets emblématiques illustrent le décalage entre performances simulées et réalité opérationnelle. Le Unitree G1, par exemple, est utilisé pour la téléopération de gestes médicaux, avec un taux de réussite d’environ 70 % lors d’essais passés à l’université de San Diego comme le rapporte tech 360.
Si la médecine fait partie des domaines sur lesquelles la précision manuelle est testée, ce n’est pas le seul qui exige une parfaite minutie. La cuisine fait partie des environnements les plus exigeants pour les humanoïdes, en raison de la nécessité d’enchaîner des gestes fins, variés, et sensibles à la texture ou à la chaleur.
La main musculo-squelettique Kengoro, conçue pour reproduire la force humaine, peut quant à elle supporter le poids total du robot en suspension. De son côté, EyeSight Hand, grâce à ses capteurs tactiles visuels, améliore considérablement les performances lors de taches complexes, selon cet article de Arxiv paru en août 2024. Le gain exact dépend toutefois des critères retenus (vitesse, précision, taux de réussite).
Face à ces défis, certains ingénieurs choisissent de réduire le nombre de doigts, parfois à trois ou quatre, pour simplifier le contrôle. Mais si l’on veut s’approcher de la polyvalence humaine, impossible d’échapper à la complexité des cinq doigts.
Panorama des mains humanoïdes
Voici un aperçu des principales mains robotiques conçues pour les humanoïdes. Chaque modèle affiche ses forces, ses compromis, ses domaines de prédilection.
| Modèle | DoF | Capteurs tactiles | Particularité technique | Usage principal |
| Tesla Optimus V2 | 22 | Non annoncé (pression prévue) | Actionnement hybride avec cables dans l’avant-bras | Logistique polyvalente |
| Shadow Dexterous Hand | 20 | Oui (pression, température) | Modèle commercial haut de gamme, 24 articulations | Télé opération, recherche |
| F-TAC Hand | ~16 | Haute résolution (0,1 mm) sur 70 % de la surface | Tactilité biomimétique avancée | Manipulation d’objets fragiles |
| EyeSight Hand | 16 | Capteurs visuo-tactiles | Retour tactile en temps réel via vision embarquée | Taches complexes multi-étapes |
| Kengoro Hand | Sous-actionnée | Non | Structure musculo-squelettique pour charge lourde | Suspension, force brute |
| Unitree G1 | 12 | Capteurs simples | Télé opération basique, faible retour haptique | Gestes médicaux, outils |
| iCub | 9 | Oui (basiques) | Format réduit, projet open source | Cognition, motricité fine |
| Figure 02 | 19 | Non précisé | Main robuste, optimisée pour l’endurance | Industrie, manutention |
| Suyuan Hand | 21 | Oui (pression) | Conçue pour la préhension adaptative à basse énergie | Services, robotique sociale |
La formule de Musk est-elle juste ?
Ce que résume la formule d’Elon Musk, c’est la densité cumulative de complexité que représente une main robotique. Elle concentre à elle seule cinq couches de sophistication :
- Mécanique : actionneurs miniaturisés, câblage serré,
- Transmissions : longueurs variables, pertes, flexions,
- Capteurs : pression, cisaillement, température,
- Contrôle : prédiction de friction, modèles adaptatifs,
- Logiciel : planification, IA, apprentissage par renforcement.
La main est aussi l’organe le plus polyvalent d’un humanoïde, elle doit pouvoir saisir une pomme, visser un écrou, manipuler une feuille A4 ou ouvrir une bouteille, sans erreur ni casse. Enfin, elle constitue l’un des composants les plus coûteux, complexes à entretenir, et sujets à l’usure. D’où l’obsession des ingénieurs pour cette « zone rouge « de l’humanoïde.
Dans un humanoïde, la main est la pièce la plus vivante mécaniquement. Sans elle, même le robot le plus équilibré, le plus agile ou le plus expressif, reste inutile. Les annonces de Tesla (22 DoF pour Optimus V2) ou Figure (19 DoF pour F.02) sont impressionnantes sur le papier. Mais c’est le passage à l’échelle, le coût, l’endurance, la maintenance, qui déterminera qui franchira ce cap. Cet article vous a éclairé ? Vous souhaitez partager une expérience ou poser une question sur les mains robotiques ? Faites-le en commentaire.
Certains liens de cet article peuvent être affiliés.