
Une équipe de chercheurs chinois a mis au point une nouvelle technique pour l’entraînement des robots humanoïdes. Un exosquelette, porté par des humains, enregistre les données de mouvements du corps pour les transmettre ensuite à des androïdes. Des progrès importants ont déjà été réalisés sur le modèle G1 de Unitree.
HumanoidExo : quand les humains apprennent leurs gestes aux robots
Les scientifiques redoublent d’ingéniosité pour entraîner les robots humanoïdes. Après les vidéos humaines filmées à la première personne, de Figure AI, c’est au tour de chercheurs en Chine de faire une nouvelle percée dans le domaine.
Développé par une équipe de la National University of Defense Technology, en partenariat avec Midea Group, HumanoidExo est une structure conçue pour capturer fidèlement les mouvements du corps humain.
Grâce à sa conception « isomorphe », l’exosquelette reproduit la configuration anatomique du bras et du torse, jusqu’à aligner ses axes de rotation avec ceux des articulations humaines. Il enregistre en temps réel la position, l’orientation et la hauteur du corps, sans dépendre d’aucun dispositif externe.
Ces données peuvent ensuite être transmises à des androïdes pour leur entraînement. Les tests de l’équipe ont porté sur des tâches allant de la manipulation d’objets sur table à des gestes plus complexes. De cette manière, les robots peuvent apprendre des mouvements en plusieurs étapes, qu’ils adaptent en fonction de leur environnement.
Comment fonctionne l’exosquelette HumanoidExo ?
Pour y parvenir, les chercheurs ont intégré un LiDAR Mid-360 à l’arrière du dispositif, couplé à un module d’odométrie LiDAR basé sur l’algorithme FAST-LIO, garantissant une localisation précise dans des environnements variés. Cette approche offre une grande robustesse, même en conditions d’éclairage difficiles ou dans des espaces dépourvus de repères visuels.
La structure est conçue pour lire les sept articulations du bras humain et aligner leurs axes de rotation respectifs. Des capteurs sur les bras et des gants enregistrent les rotations et angles des articulations.
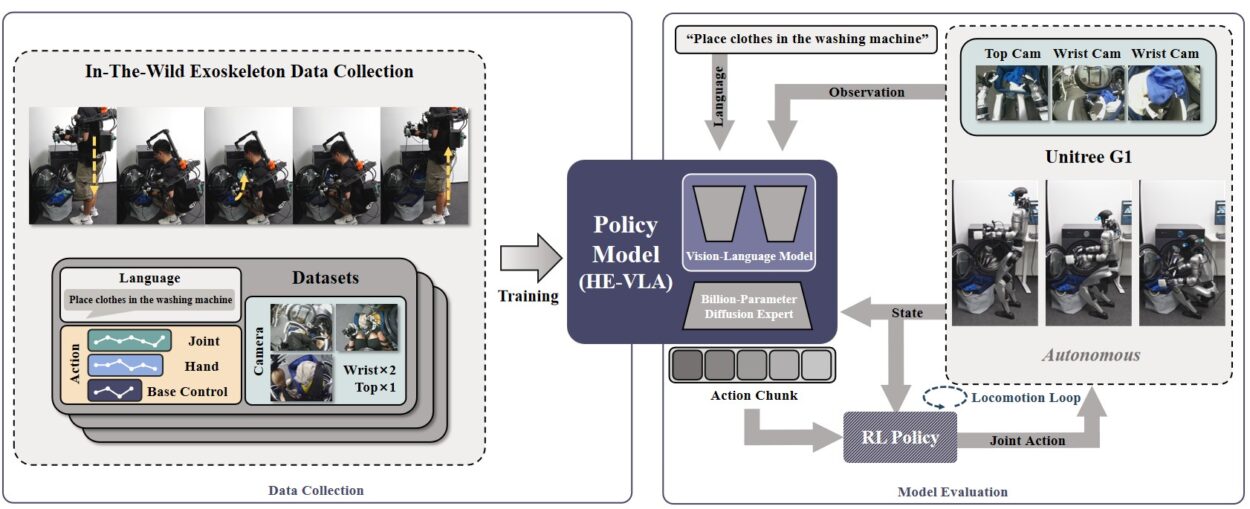
L’exosquelette ne se limite pas au haut du corps : il capte également les déplacements des jambes, essentiels pour des tâches de locomotion comme la marche, les squats ou les transitions entre position debout et assise. Les données sont ensuite traitées par un système d’intelligence artificielle à double couche, baptisé HumanoidExo-VLA, pour servir à l’entraînement des robots.
Deux composantes technologiques principales permettent d’effectuer les tests :
- le modèle « Vision-Langage-Action » (« VLA »), capable d’interpréter la tâche à exécuter ;
- un contrôleur d’équilibre appris par renforcement, chargé de maintenir la stabilité du robot pendant ses mouvements.
Des résultats impressionnants avec le robot Unitree G1
Les chercheurs ont validé leur approche sur le robot humanoïde G1 de Unitree. Trois types de tâches ont été testés :
- des manipulations simples sur table,
- des manipulations nécessitant des flexions (comme se baisser pour atteindre un objet),
- et des manipulations complètes incluant la marche et le déplacement.
L’une des expériences consistait, par exemple, à faire se baisser un robot pour charger une machine à laver, simulant une activité domestique réelle.
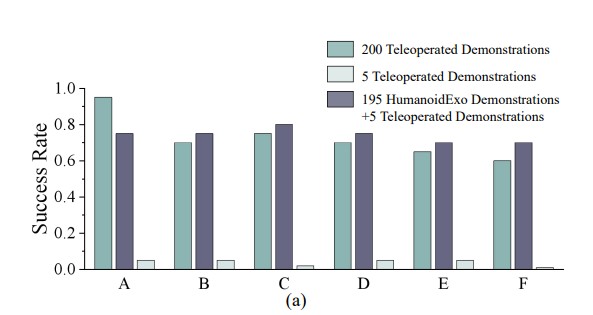
Les résultats sont frappants. En ajoutant 195 sessions enregistrées via HumanoidExo à une base de 5 démonstrations téléopérées directement sur un robot, le taux de réussite sur une tâche de manipulation sur table est passé de 5 % à environ 80 %. Ces données hybrides se sont révélées presque aussi efficaces que le recours à 200 démonstrations téléopérées (sans exosquelette), tout en étant beaucoup plus économiques et faciles à collecter. Le comparatif des résultats est disponible dans le graphique ci-dessous.
Autre observation notable : le robot a appris à se déplacer jusqu’à une table pour accomplir une tâche, alors même que la marche n’avait pas été explicitement enseignée. Lors des tests, le G1 a même retrouvé son équilibre après avoir été volontairement poussé par les chercheurs, démontrant la solidité du modèle de contrôle.
Vers une résolution des problèmes liés aux données d’apprentissage ?
L’un des principaux obstacles à l’avancée des humanoïdes reste le manque de données de qualité pour l’entraînement des modèles.
Les démonstrations téléopérées sur des robots sont coûteuses, lentes à produire et demandent une expertise importante. Elles nécessitent en effet un opérateur humain par humanoïde.
Les simulations, ainsi que les vidéos humaines, comme celles d’EgoMimic, Vid2Robot ou de Figure AI, posent, d’après l’équipe de chercheurs chinoise, d’autres problèmes. Il existerait un « écart d’incarnation », dû à des différences de dynamiques, mais aussi « morphologiques et cinématiques » entre individus et androïdes. Ce qui se traduirait par des soucis d’équilibre potentiels chez les robots.
HumanoidExo entend apporter une réponse directe à ces problématiques. Il permet de collecter des données humaines complexes, réalistes et variées, sans intervention d’un opérateur distant, et il diminue l’écart d’incarnation.
HumanoidExo marque une avancée décisive dans la formation des robots humanoïdes.
En capturant directement les mouvements humains au moyen d’un exosquelette portable, cette approche permet de générer des données réalistes à faible coût, tout en améliorant significativement les performances des robots comme le Unitree G1. Cette innovation pourrait transformer la manière dont les humanoïdes apprennent à interagir avec leur environnement, rapprochant un peu plus leur coordination et leur autonomie de celles des humains.
Ce procédé vous semble-t-il plus prometteur que les vidéos filmées à la première personne ? Pourrait-il être transposable aux exosquelettes et aux robots Calvin-40 de la start-up française Wandercraft ? Donnez-nous vos impressions en commentaire !
Certains liens de cet article peuvent être affiliés.