
Le 8 septembre 2025, une équipe internationale de chercheurs a publié dans la revue scientifique américaine PNAS (Proceedings of the National Academy of Sciences of the United States of America) une étude qui pourrait transformer la robotique et l’IA. Ils présentent un principe appelé « courbure » (« curvity », en anglais), ayant permis à un essaim de robots de s’organiser et de se déplacer de façon fluide, sans chef d’orchestre. Retour sur leur expérience révolutionnaire.
Une intelligence collective basée sur le biomimétisme
Vous avez sans doute déjà vu des vidéos de ballets de drones, formant des figures dans le ciel, pour le 14 juillet ou lors d’événements en Chine. Si la technique reste spectaculaire, ces formations sont toutefois programmées pour accomplir des déplacements précis, choisis à l’avance. Elles ne s’adaptent pas à leur environnement immédiat pour effectuer leurs mouvements.
La nouvelle étude publiée dans la revue PNAS change la donne. L’équipe de chercheurs à l’origine du papier est parvenue à développer un système d’intelligence collective, inspiré « des bancs de poisson et des nuées d’oiseaux« . Ce procédé a permis à un groupe de robots de se déplacer de manière coordonnée et en temps réel, en suivant les mêmes principes : éviter les collisions et les contacts trop rapprochés, et se déplacer dans la même direction. Le tout, sans avoir à suivre de leader ou de directives préalables.
Reproduire ce schéma avec des machines artificielles s’est avéré être un défi colossal. Comment obtenir un comportement collectif sans qu’un robot central ne distribue d’instructions ?
La « courbure » comme moteur collectif de l’essaim de robots
Les scientifiques ont trouvé un début de réponse en passant par la géométrie. Ils ont défini ce qu’ils nomment « curvity » (la « courbure », en français), une propriété qui joue le rôle métaphorique d’une charge électrique, attribuée à chaque machine.
Dans leur expérience, cette valeur détermine la façon dont chaque robot ajuste son parcours à proximité des autres. A la manière des charges électriques, elle provoque soit une attraction, soit une répulsion, et modifie aussi la courbure de sa trajectoire. Comme nous l’explique Futura Sciences, si la valeur est positive, le robot effectue un virage dans un sens ; si elle est négative, il vire dans l’autre sens.
Chaque élément du groupe réagit à un niveau local, et donc uniquement à ses plus proches voisins. Si ceux qui sont devant changent de direction, chacun se met alors à suivre le mouvement, dans une réaction en chaîne.
Il s’est avéré, avec cette méthode, que les robots étaient capables de s’organiser en groupe, même sans communication centralisée. De plus, cette capacité, dans son fonctionnement théorique, ne dépend ni du nombre de robots ni de la connaissance globale de l’essaim.
Les applications possibles pour la robotique
Les scientifiques soulignent le caractère novateur de cette approche. En définissant une règle aussi simple que la courbure du déplacement, il devient possible d’appliquer cette logique à toutes sortes de robots.
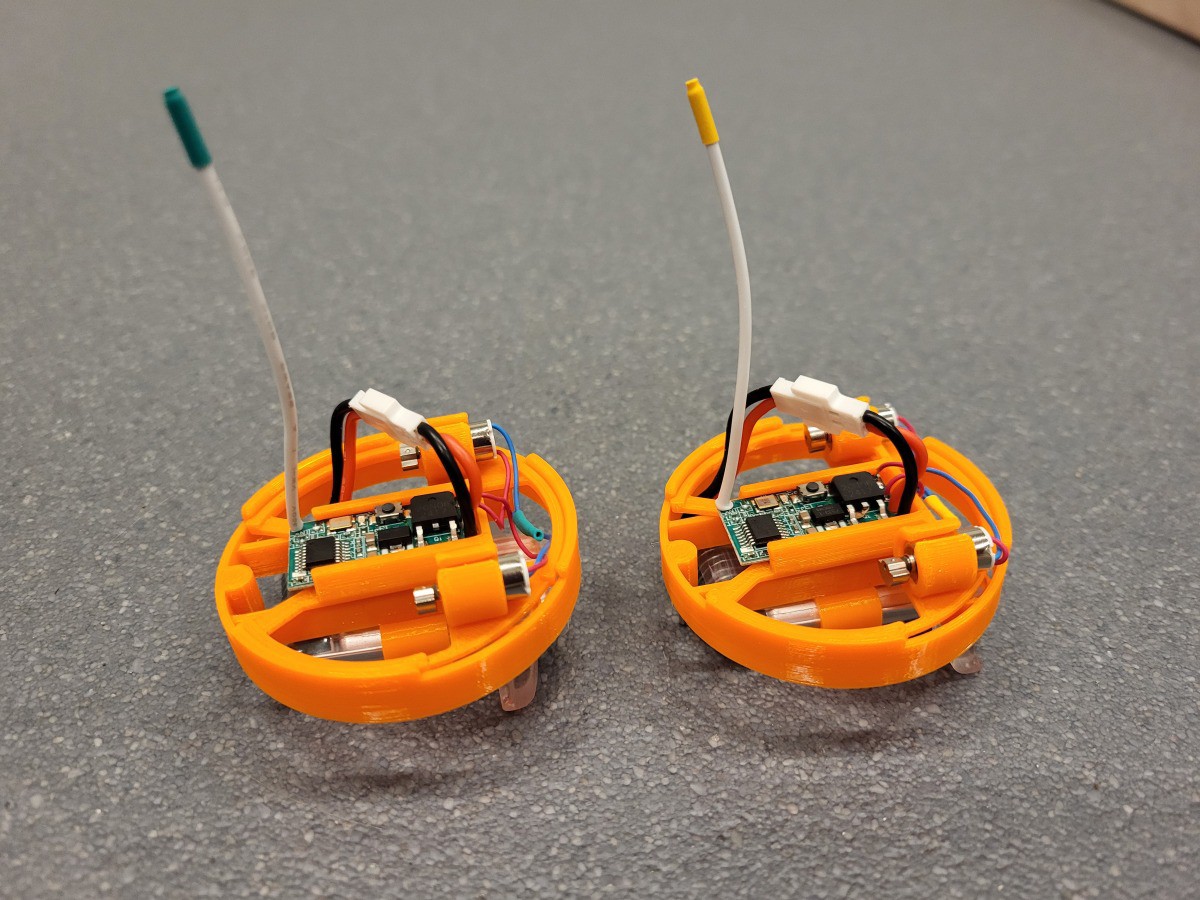
Bien que l’expérience ait été menée avec de petits robots rudimentaires, selon le chercheur Matan Yah Ben Zion, cela fonctionnerait, en principe, également pour des machines industrielles géantes. Ou bien des nano-robots médicaux, qui circuleraient dans le corps humain.
L’équipe parle aussi d’usages possibles dans le domaine de la sécurité civile, que ce soit pour la détection des feux de forêt ou les opérations de recherche et de sauvetage sur de vastes territoires. De quoi offrir de nouvelles pistes de réflexion sur l’utilité de la robotique et de l’IA dans la prévention et la gestion des risques naturels.
Cette expérience fascinante montre à quel point robotique et intelligence artificielle peuvent travailler de concert pour relever de nouveaux défis. Elle met également en avant un type d’IA novateur, décentralisé et basé sur le collectif. Et vous, quel genre d’application imaginez-vous pour ces « troupeaux » de robots ?
Certains liens de cet article peuvent être affiliés.